
Alcabot Starting es un kit de robótica de hardware abierto basado en Arduino diseñado como elemento de introducción a la robótica móvil. Diseñado originalmente para cursos de formación de profesorado orientados a la construcción de robots para participar en la competición Eurobot Spain, es idóneo para ser utilizado en cursos de tecnología de enseñanza secundaria, cursos de introducción a la robótica móvil a nivel universitario o como elemento base para aficionados a la robótica.
El kit fue diseñado dentro del proyecto FCT-19-15413 financiado por la Fundación Española para la Ciencia y la Tecnología (Ministerio de Ciencia e Innovación) buscando que fuera económico, de materiales disponibles en Internet, y que diera posibilidades para trabajar aspectos relativamente avanzados de robótica móvil.



Las principales características que orientaron el diseño fueron:
- Simplicidad
- Uso de hardware abierto
- Coste reducido
- Flexibilidad a la hora de conectar dispositivos.
- Robustez
- Posibilidades de ampliación
- Uso de manipuladores
- Uso de motores con encoders que permita implementar control en lazo cerrado de velocidad y posicionamiento por odometría.
- Comportamiento ágil
- Baterías recargables de larga duración
Elementos del kit Alcabot Starting
El kit tiene los siguientes elementos (enlaces de compra en la sección de documentación)
- Sistema de control basada en Arduino con un módulo de expansión de prototipado.
- Elementos de tracción: Dos motores de corriente continua con encoders que permiten medir la velocidad y así poder implementar algoritmos de control.
- Etapa de potencia para controlar dos motores de corriente continua.
- Sensores:
- Sensor de distancia de ultrasonidos – SR04
- Dos Sensores de infrarrojos reflexivos
- Pinza accionada por un servomotor que incluye un sensor de corriente para medir el esfuerzo que está realizando el motor al apretar la pinza.
- Sistema de alimentación: formado por unas baterías recargables, su cargador y un fusible se protección contra cortocircuitos.
- Módulo de comunicaciones Bluetooth que permite el radiocontrol del robot y la telemonitorización de información.
- Estructura del robot:
- Base metálica donde van sujetos los diferentes elementos del robot.
- Tornillería y cables necesarios para el montaje y la conexión.
Diagrama de bloques general
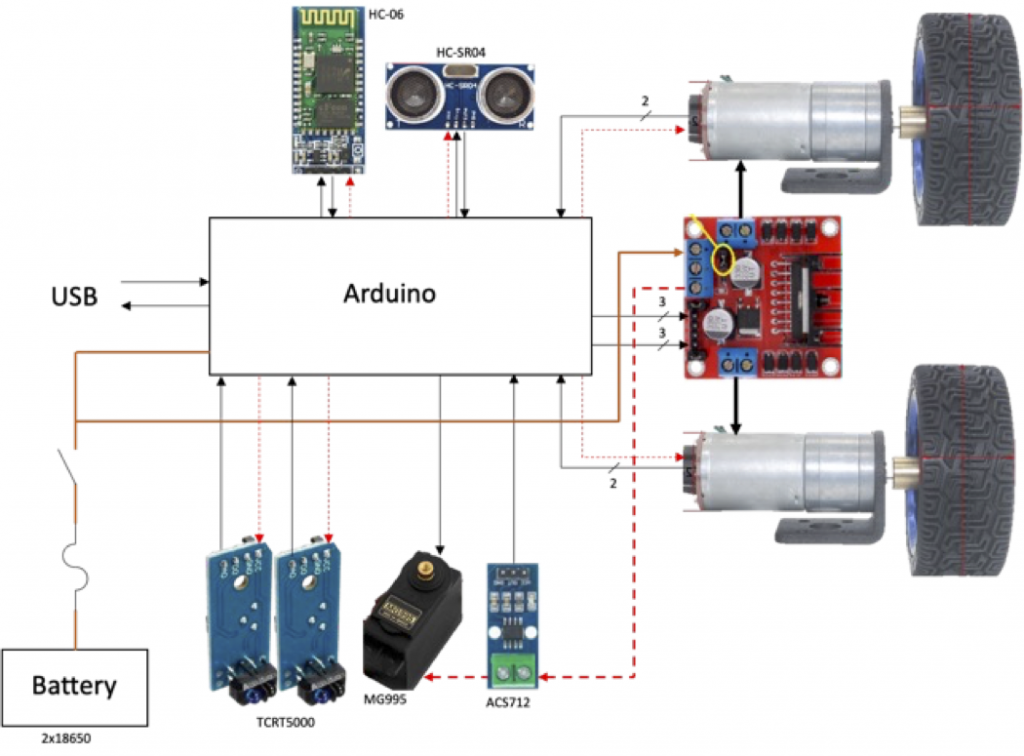
Sistema de control
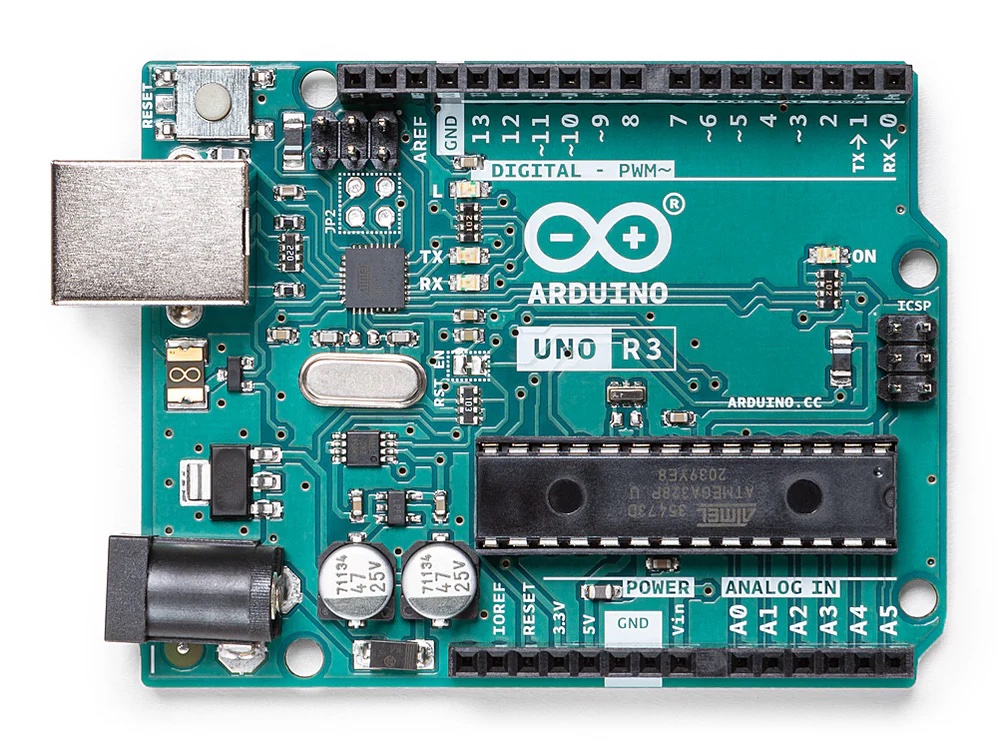
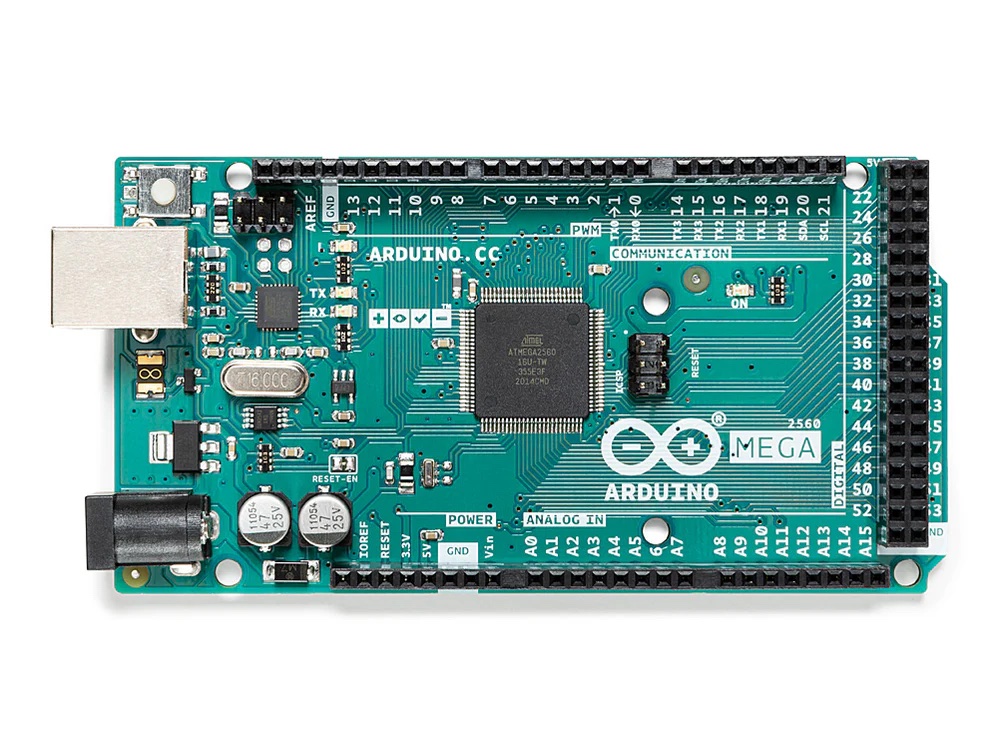
Plataforma basada en la arquitectura Arduino pensada para trabajar con el Arduino UNO o con el Arduino MEGA o tarjetas compatibles.
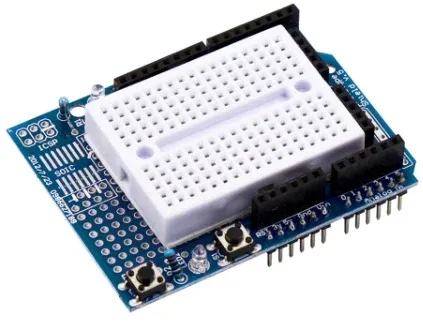
Como complemento se utiliza la tarjeta de expansión ProtoShield que proporciona mucha versatilidad a la hora de realizar las conexiones. Tiene varios pines de masa y alimentación y la protoboard permite realizar conexiones de los diferentes elementos hardware.
Elementos de tracción
El sistema de tracción está formado por dos motores de corriente continua JGA25-370 de 25mm de diámetro, un eje de 4mm, con reductora y encoder integrado y con potencia suficiente para mover la estructura con agilidad.
Este motor es económico, fácil de conseguir por internet con diferentes relaciones de reducción y se puede encontrar con unos soportes en L para sujetar fácilmente los motores a la estructura y con ruedas. La reducción elegida es 35:1. En la tabla pueden verse las características.
Cada motor incorpora un encoder diferencial de efecto hall con salida en cuadratura que proporciona 11 pulsos por vuelta del eje del motor que, teniendo en cuenta la reductora de 35:1 proporcionan 358 pulsos por vuelta de las ruedas.
Los encoders permiten mejorar el comportamiento del robot al poder medir el avance de cada rueda. Aplicando odometría el robot puede saber dónde está situado y aplicando sencillos algoritmos de control se puede controlar la velocidad de las ruedas, hacer que el robot realice trayectorias rectas y giros controlados, …



Etapa de potencia
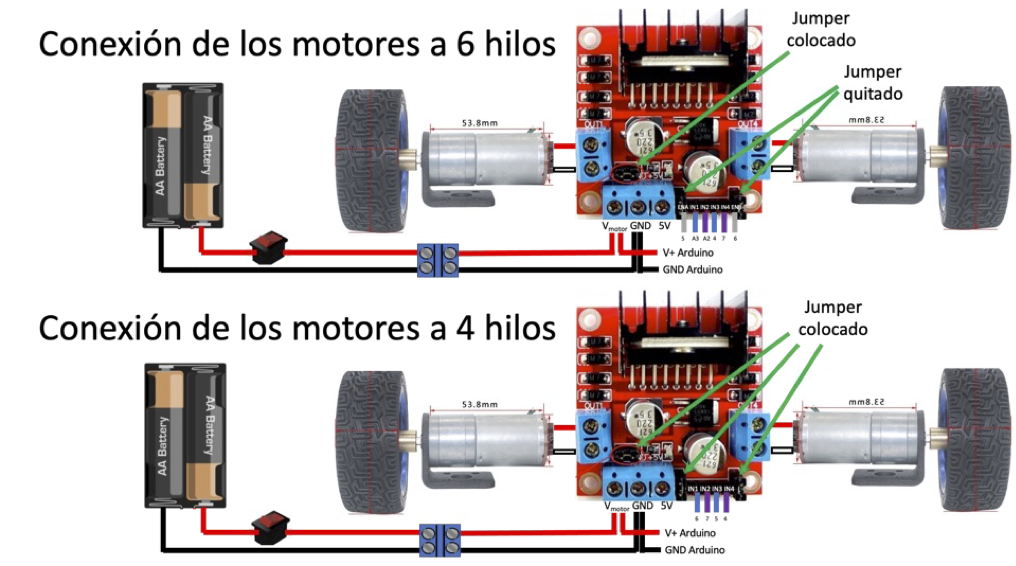
El Kit utiliza como etapa de potencia el doble puente en H bipolar L298. Se ha elegido por ser muy económico, robusto y con mucha información sobre él en internet. También es muy útil la salida de 5V que incorpora.
El puente en H puede controlarse a 4 hilos con las señales de enable siempre activas o a 6 hilos como puede verse en la figura adjunta.
Sensor de distancia de ultrasonidos – SR04
El kit incluye el sensor de ultrasonidos HC-SR04, sencillo de utilizar, económico y con mucha información en Internet. El sensor mide en distancias de 2cm a 450cm con una apertura de 15º y una precisión de 3mm.

Imagen obtenida de aquí
Sensor de infrarrojos reflexivo
EL kit incluye dos módulos basados en el sensor de infrarrojos reflexivos TCRT5000, muy utilizados en robótica, de bajo coste y que dispone de una salida analógica proporcional a la señal reflejada y una salida digital después de pasar por un comprador ajustable con un potenciómetro.
Estos sensores se pueden utilizar para implementar un robot siguelíneas, un robot de sumo, o para identificar entre colores en función de la capacidad de detección de infrarrojos.
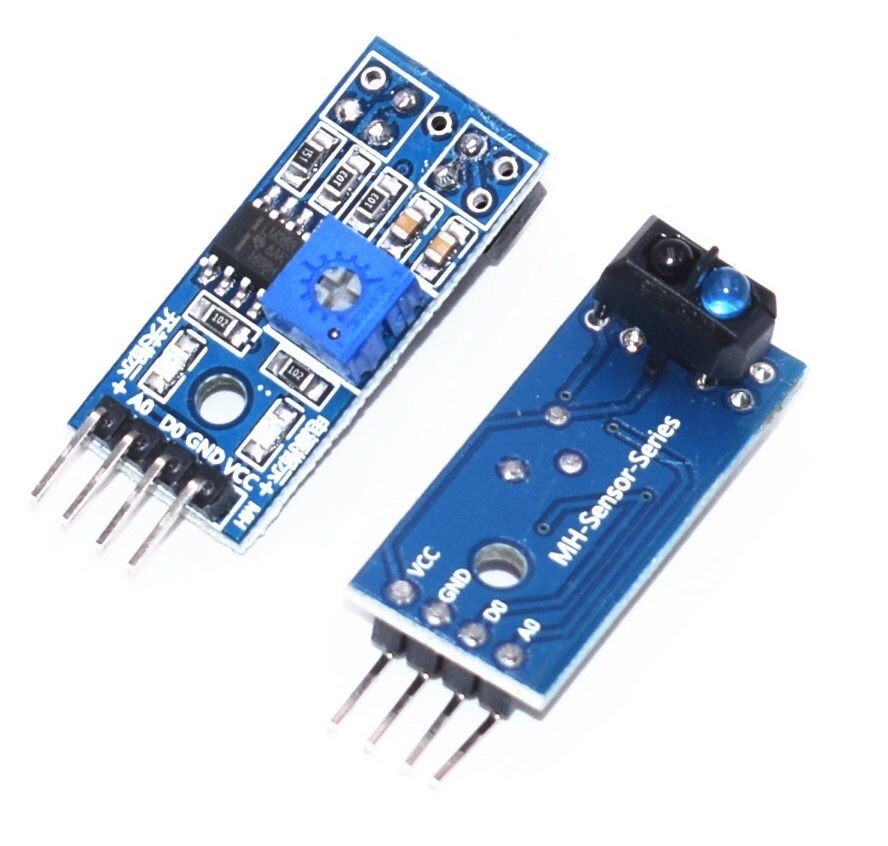
Imagen obtenida de aquí
Pinza controlada por servomotor con medida de corriente
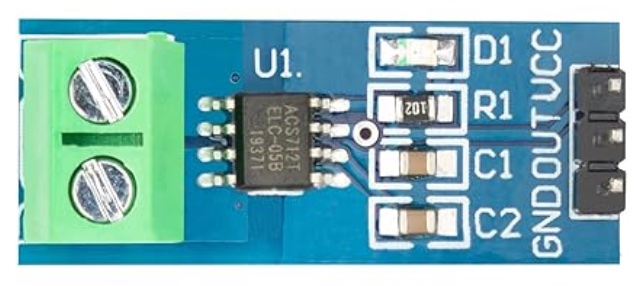
El kit incorpora una pinza accionada con un servomotor estándar de radiocontrol y un sensor de corriente que permite medir la fuerza que está haciendo el servomotor y saber así si la pinza ha cogido un objeto o no.
El servomotor MG995 es un servomotor estándar de radiocontrol con engranajes metálicos, un recorrido de 180º, un par de 10kg/cm a 6V y una velocidad de ajuste 0.16s / 60 grados a 6V sin carga.
Se utiliza un módulo basado en el sensor de corriente ACS712 con un rango de +/- 5A de medida y una salida analógica con una sensibilidad de 185mV/A.


Módulo de comunicaciones Bluetooth
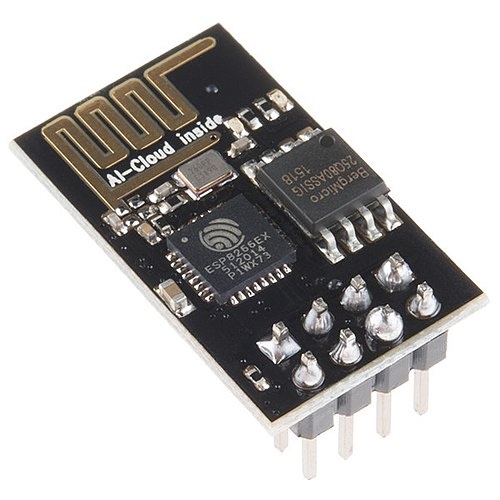
El kit incorpora el módulo HC-06 que proporciona una comunicación serie asíncrona sobre Bluetooth y poder así monitorizar en remoto el comportamiento del robot o permitir telecontrolarlo. Este módulo se elige por su bajo precio pero también se podría utilizar el HM-10 más moderno y más compatible con móviles y ordenadores modernos. También podría utilizarse un módulo basado en el ESP8266 que permite comunicación sobre WiFi.

Sistema de alimentación
El robot utiliza dos baterías recargables de Litio de 3,7V de formato 18650 que proporcionan una tensión de 7,2V que alimenta tanto la tarjeta de Arduino UNO como el puente en H a través de un interruptor. Suelen encontrarse fácilmente baterías de capacidades entre 2500mAh a 5000mAh. Es importante tener precaución al utilizar baterías de Litio ya que pueden incendiarse en caso de cortocircuito prolongado.
El kit incluye un fusible se protección contra cortocircuitos y un cargador de estas baterías.


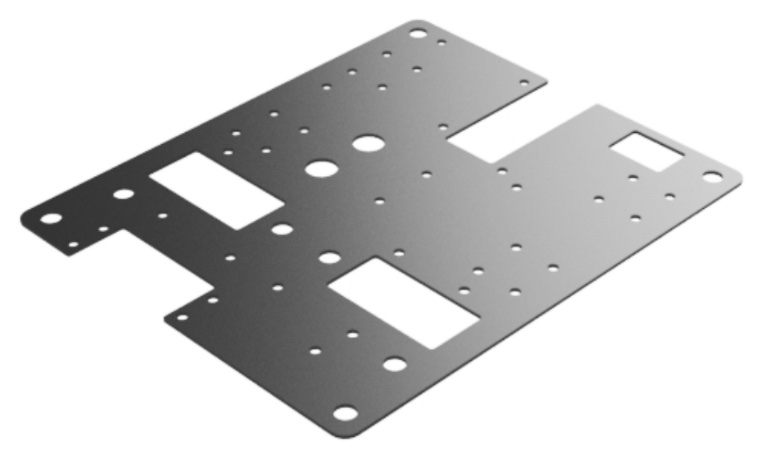
Estructura del robot
Como estructura se utiliza una placa de aluminio de 1,5mm de espesor mecanizada con los agujeros para los tornillos para los motores, el puente en H, la tarjeta de control, portapilas, la pinza … y varios espacios para pasar cables.
Están disponibles los planos y ficheros para que sea fácilmente replicable. También se puede utilizar como base una madera, una placa de PVC, …
Vídeo del montaje
Documentación y archivos disponibles sobre el kit:
- Kit Starting – Lista de Materiales
- Kit Starting – Lista de Materiales – Enlaces compra
- Kit Starting – Esquema Conexiones
- Kit Starting – Archivos Fritzing – Conexiones
- Kit Starting – Ejemplo Motores
- Kit Starting – Odometria
- Kit Starting – Sensores Distancia Ultrasonidos
- Kit Starting – Sensores Infrarrojos Reflexivo
- Kit Starting – Sensores Giro





