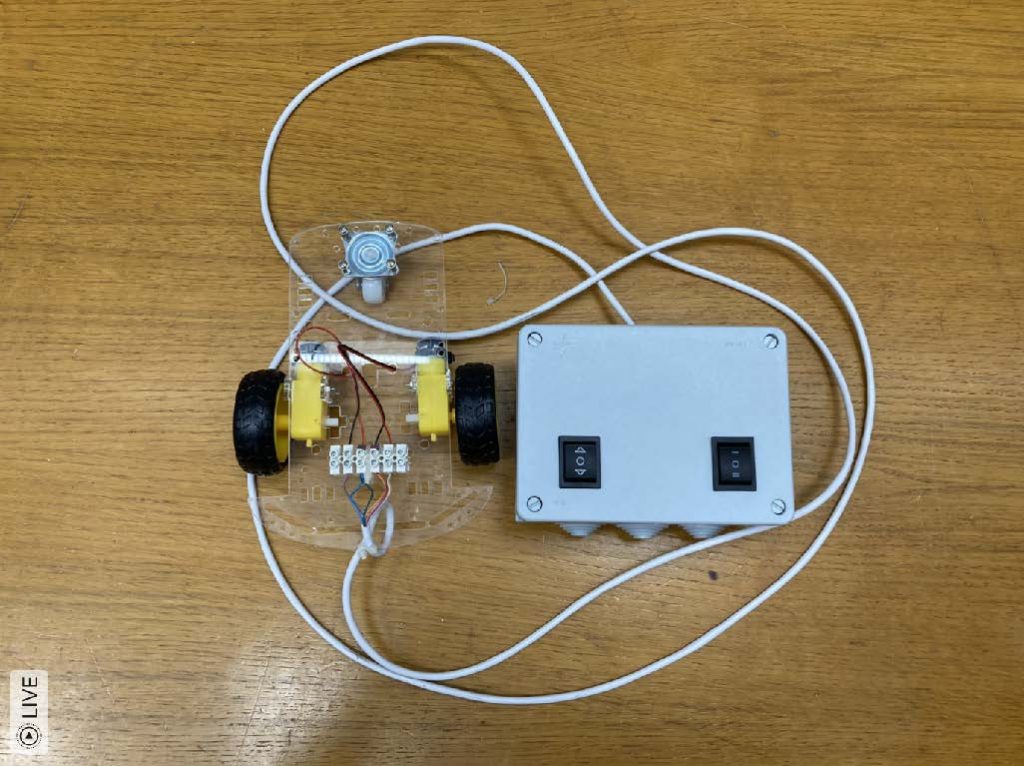
La plataforma Alcabot Electrical consiste en una base robotizada motorizada controlada por una unidad de control sin electrónica (sólo conexiones eléctricas).
Esta plataforma robótica está diseñada para ser utilizada en educación primaria como aplicación de circuitos eléctricos a la construcción de un robot o como iniciación a la robótica y la automatización en educación secundaria.
Descripción del kit
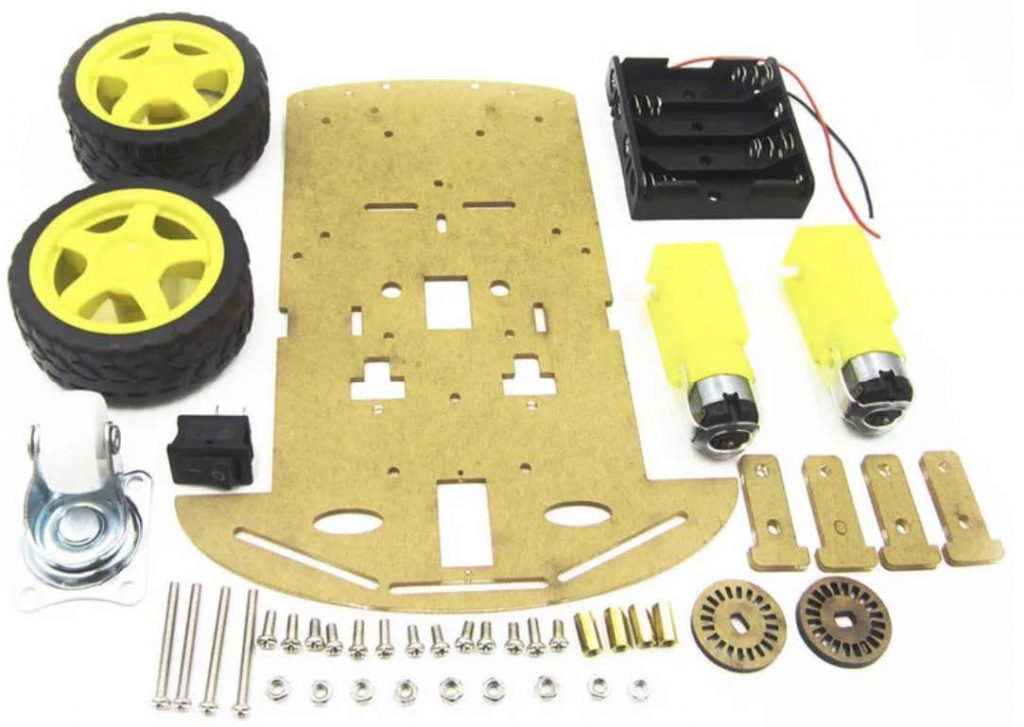
Estructura mecánica
Como estructura mecánica se puede utilizar cualquier plataforma con dos motores de corriente continua. Nosotros hemos elegido la que actualmente es más económica y fácil de conseguir. Esta kit incluye:
- 1x Base de metacrilato
- 2x motores DC con reductora
- 1x Rueda tipo castor
- 1x Portapilas
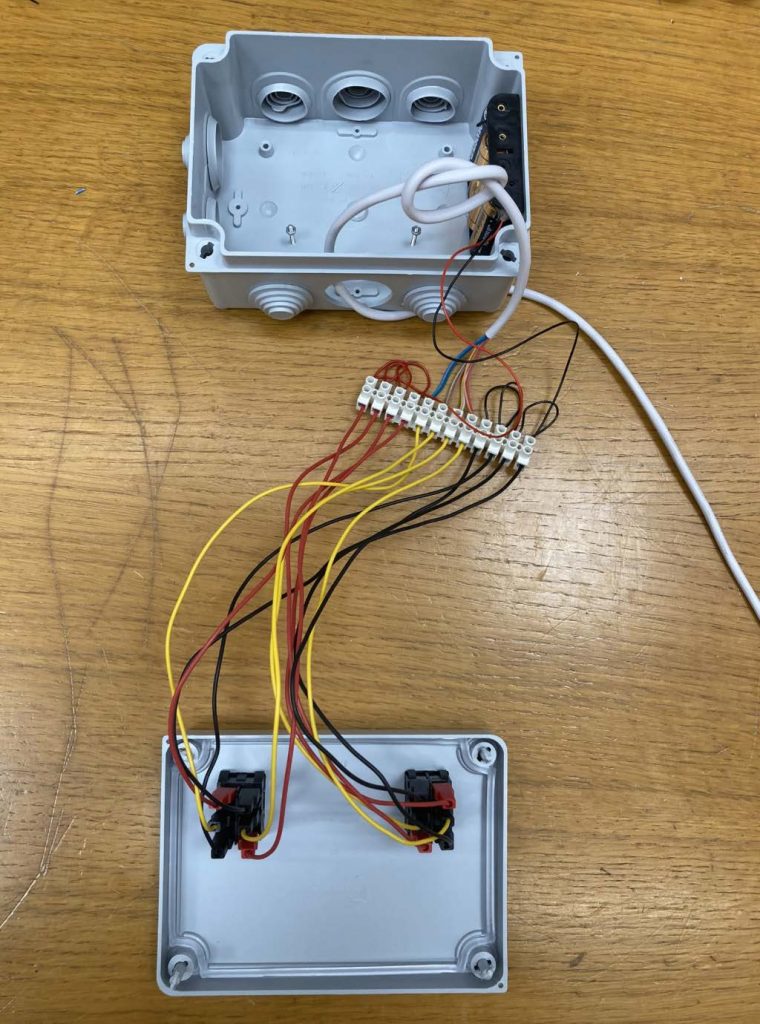
Sistema de control
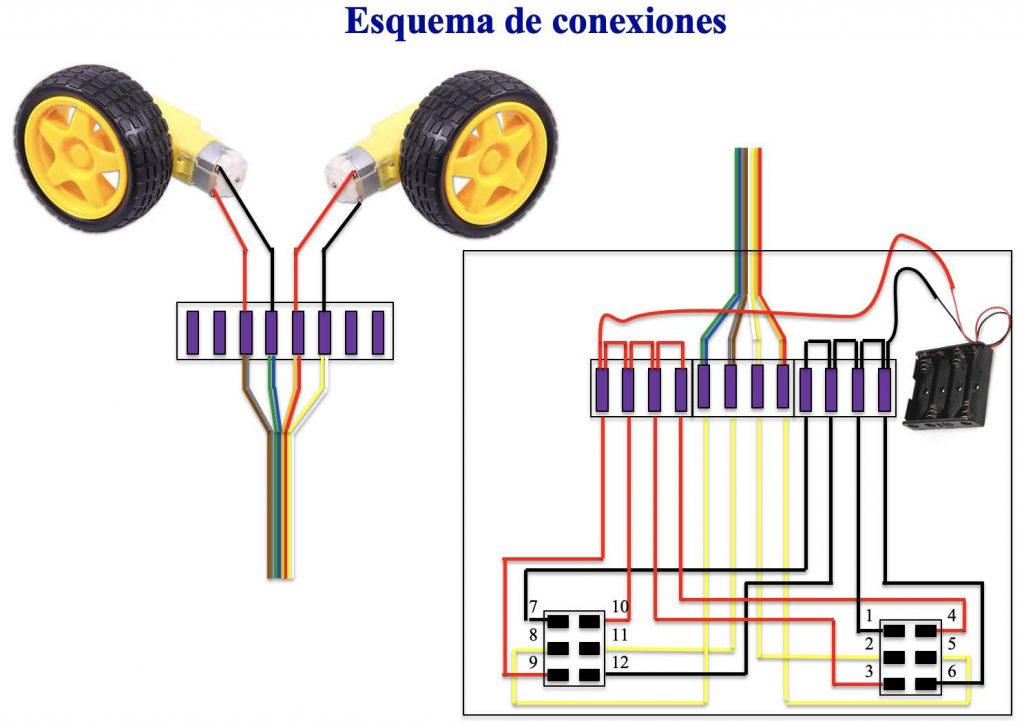
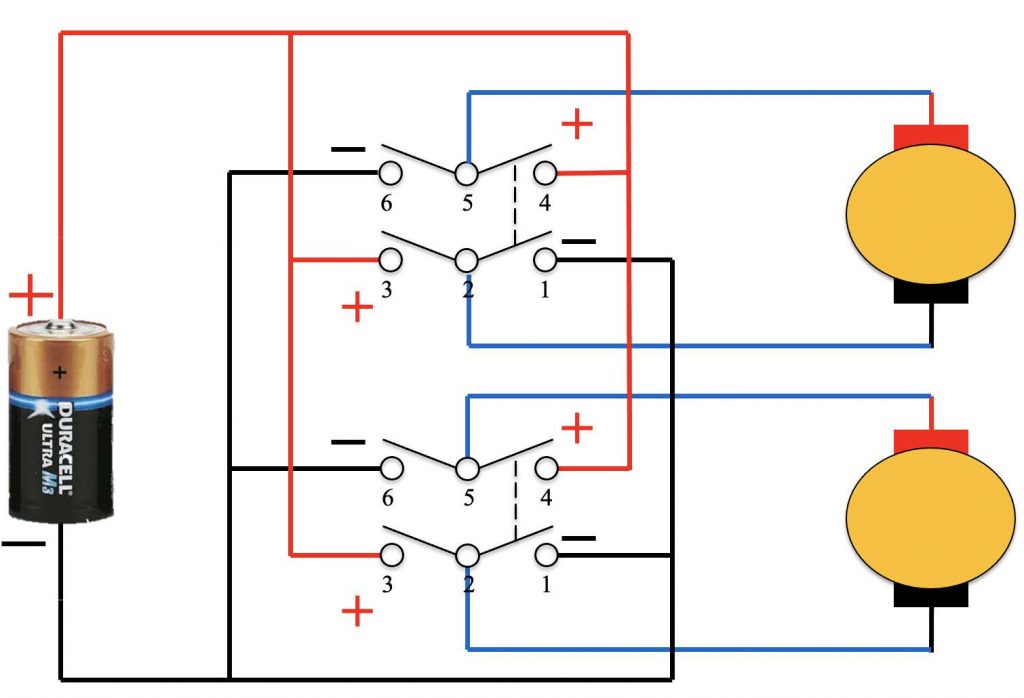
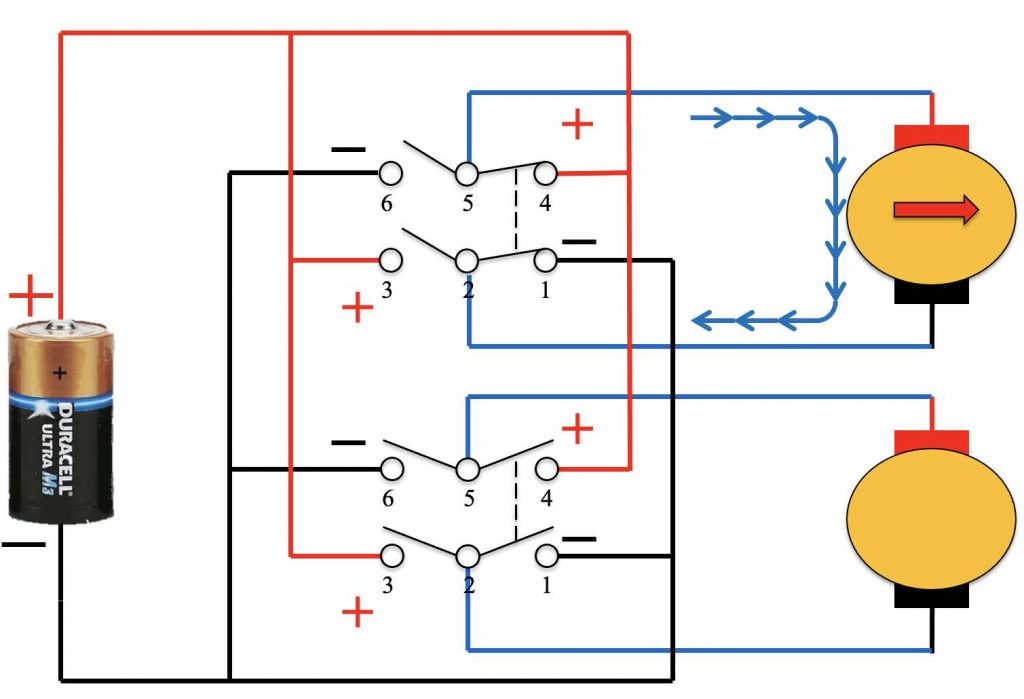
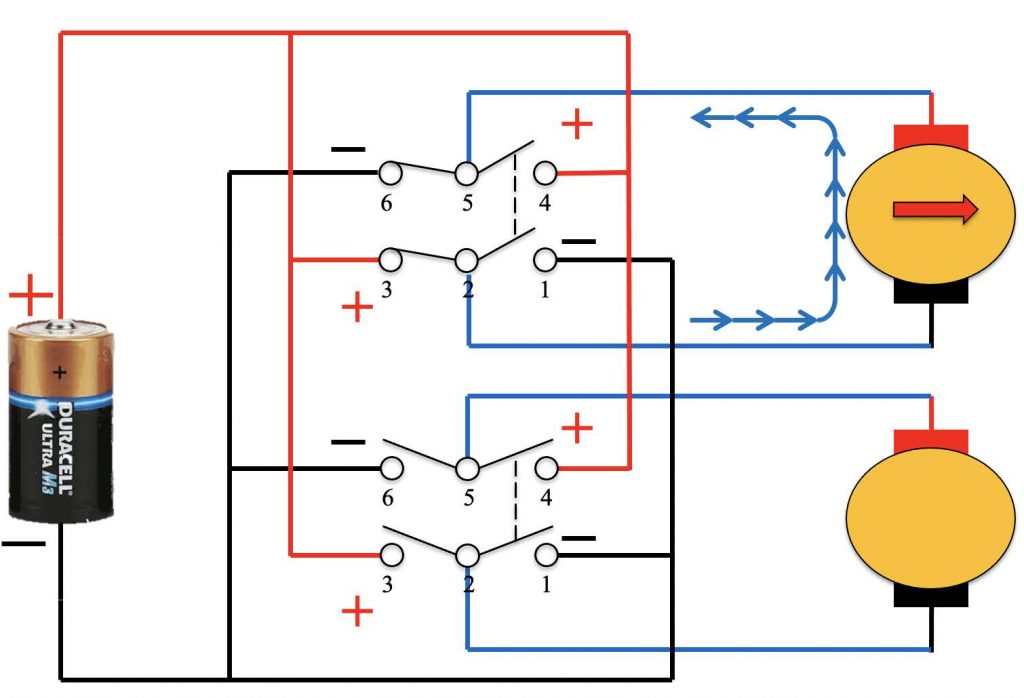
El sistema de control consiste en una caja de conexiones eléctricas de 153×110 mm con dos interruptores basculantes RB24KC1100 DPDT con punto neutro de interruptor, terminales y cables con conectores Faston hembra para conectar a los interruptores de acuerdo con el esquema de conexiones que se muestra más adelante. Los circuitos simulan un doble puente en H accionado con los interruptores de forma que cada interruptor controla el movimiento de un motor con 3 posibilidades:
- Avanzar
- Retroceder
- Paro
La conexión entre el sistema de control y los motores se debe realizar con un cable de al menos cuatro hilos, dos por cada motor, pero es conveniente dejar más hilos libres por si en una futura ampliación se colocan más actuadores en el robot. Un cable de red de 8 pares es una solución aconsejable porque es fácil de encontrar y económico, aunque se utilicen menos hilos.
Esquema de conexiones